Robot Kol Nasıl Yapılır

Evde Robot Kol Yapimi Youtube
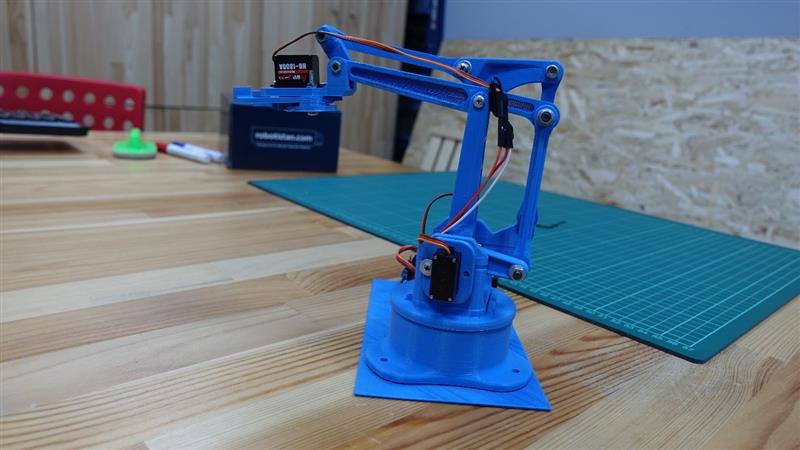
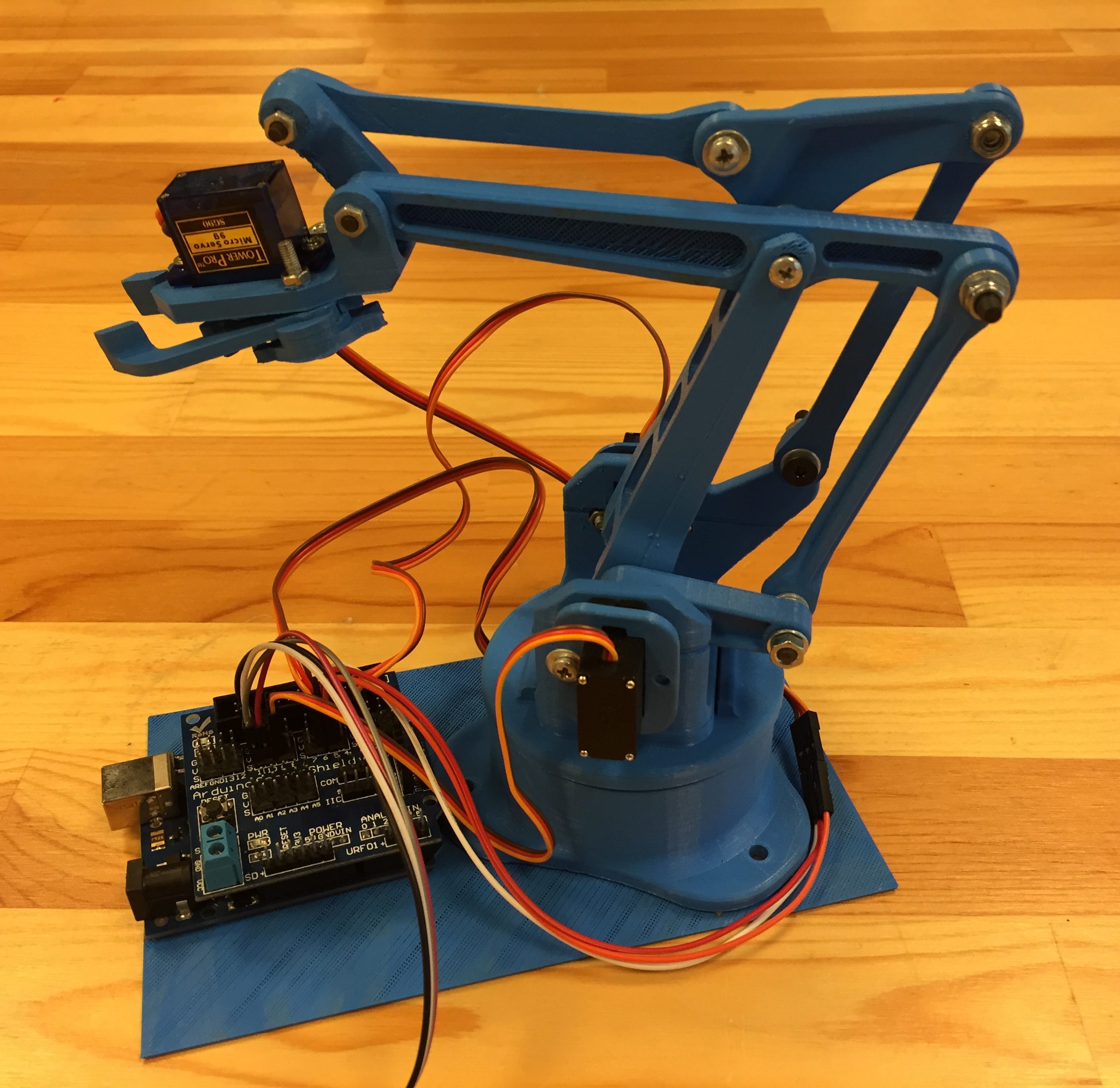
3 Boyutlu Akilli Arduino Robot Kol Yapimi

Basit Robot Yapimi Nasil Yapilir Robot Kol Bolum 1 2 Youtube

Robot Kolu Nasil Yapilir For Barn Arbete Roliga Barn
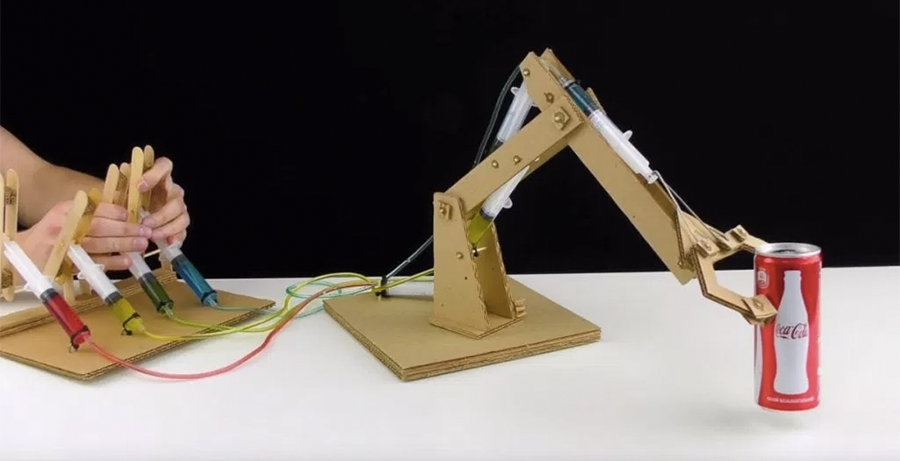
Kartondan Calisan Bir Robot Kol Olusturabilirsiniz Aba Innolab

Robot Kolu Nasil Yapilir Kendin Yap Diy Youtube

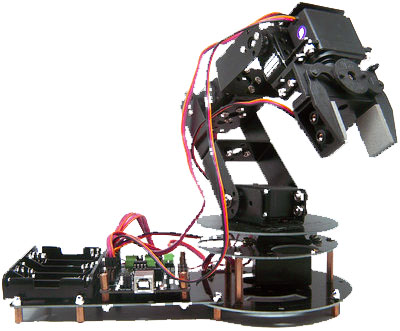
20 mm 4 adet 8 mm 2 adet vida ve somun ile servo motor kullanarak resimlerde görüldüğü gibi taşıyıcı kısmı hazırlıyoruz.
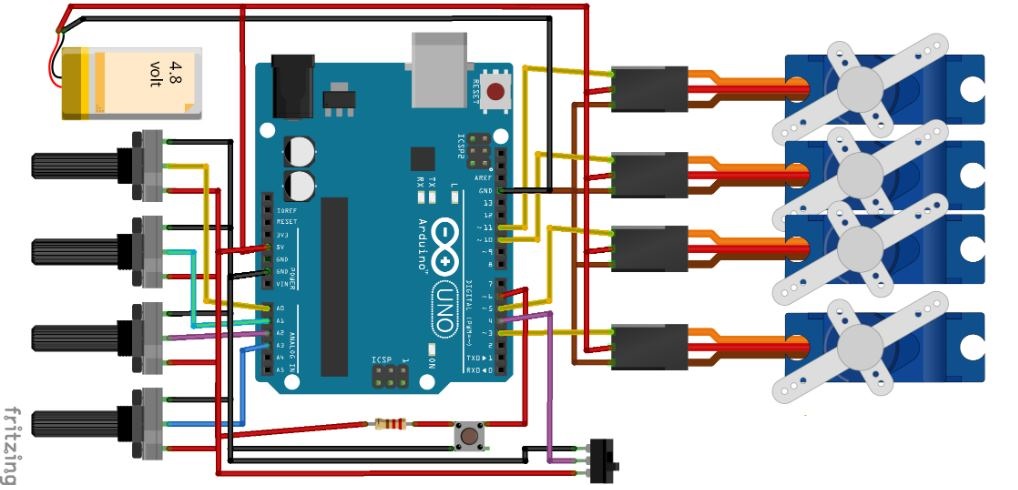
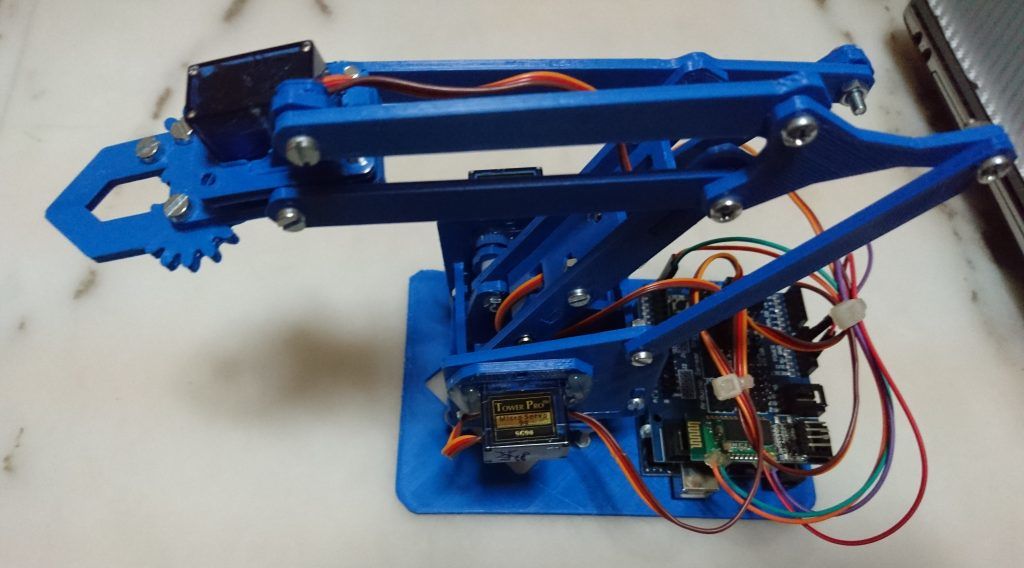
Robot kol nasıl yapılır. Arduino 5v dc ve gnd pinlerine hakim fakat bir arduinodan maksimum 200ma akım çekersiniz. Ancak biz bu yazımız süresince sizlere robot kol nasıl yapılır sorusunun cevabını vermeye çalışacağız. Robot kollarını kontrol etmek için kendi android uygulamamızı geliştirmeye robot parçalarını tasarlamaya ve 3d parçalarını yazdırmaya elektronik bileşenleri birleştirmeye ve arduino yu programlamaya başlayarak tüm yapım sürecini detaylarıyla inceleyelim. Bu sistem fikir vermek ve bu eğlenceli uğraşı paylaşmak için oluşturulmuştur.
Herşeyden önce kullanılacak malzemelerin listesini yapalım. İlk olarak taşıyıcı kısmı yapacağız. Robot kol nasıl yapılır. Adlı video ile karşınızdayız.
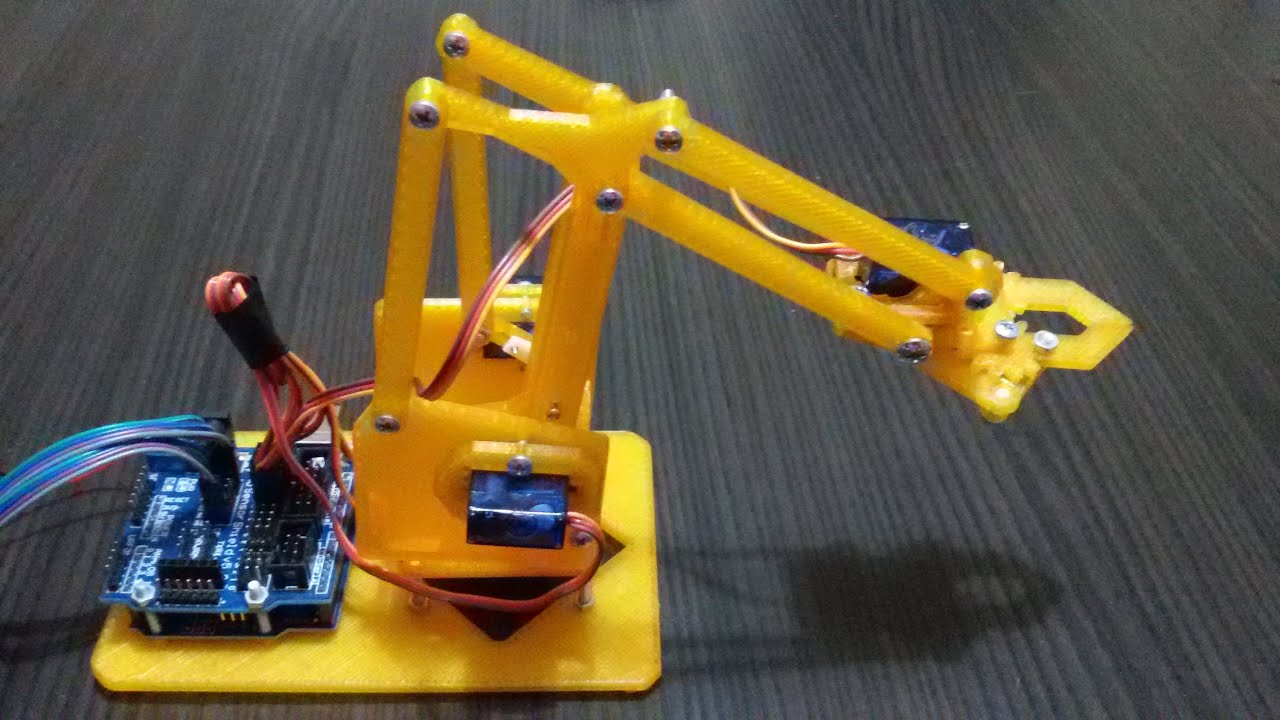
Bundan dolayı yazımızda sizlere bu konuda basit ipuçları vereceğiz. Elimizde olan 4 servolu robot kol için 2 farklı joystick modül ile sistemi kontrol edebiliriz. Arduino ile joystick kontrollü robot kol projesi. App inventor ile robot kol kontrolü yapmak için gerekli olacak kod bloğunu ve androin telefon uygulamasını yapacağımız bu yazımızda robot kol montajından sonra robot kolun bluetooth ile uzaktan kontrolünü sağlıyor olacağız.
Robot kol yapımı montajına başlamadan önce servo motor bağlantılarını gösteren fritzing ile başlayalım servo motor 5v dc gnd ve bilgi pini olmak üzere 3 pini bulunmaktadır. Joystik modülü x ve y olmak üzere iki farklı düzlemde 0 ile 1023 arası değer veren ve üzerinde bir adet buton olan sistemdir. Evde eğlence amacıyla kolaylıkla yapabileceğiniz şirin bir makine. Robot kol yapımı dersimizkodlama 15 kasım 2018 1 046 views 25 yorum tubi̇tak 4006 bilim fuarı kapsamında hazırladığım robot kol yapımının projesini sizlerle paylaşıyorum.
4 servo motor ise yaklaşık 1 amper akım ister. 3 boyutlu akıllı arduino robot kol yapımı merhaba arkadaşlar. Arduino ve joystick ile robot kol kontrolü projemizde öncelikle joystick modül kullanımından bahsedelim. Robot kol yapmak robot kol yapabilmek için öncelikle işe nereden başlanacağını bilmek gerekir.

Robot Kol Nasil Yapilir Nasil Yapilir
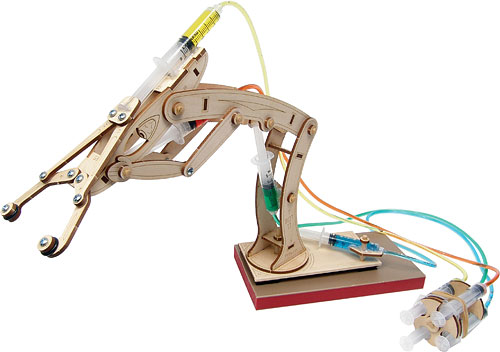
Hidrolik Hareket Sistemi Robot Kol Yapimi Teknoloji Ve Tasarim Dersi Etkinlikler Ozgun Ders Icerikleri Ve Daha Fazlasi

Karton Dan Hidrolik Robot Kol Yapimi
Youtube Robot Youtube Transformers
3 Boyutlu Akilli Arduino Robot Kol Yapimi

Hidrolik Robot Kol Denemesi Youtube

Robot Kol Yapimi

Kartondan Robot Kol Yapimi Yaratici Oyun Ve Ogretici Aktiviteler

Robot Kolu Nasil Yapilir Youtube Oyuncak Cocuklar Icin Sanat Okul
Robot Kol Yapimi

Mekatronik Robot Kol Projesi

Ogrenme Fonksiyonuna Sahip Hareket Kopyalayan Robot Kol Yapimi

Robot Kol Yapimi Lazer Kesim Proje Hocam

Robot Kol Yapimi Arduino Ile Servo Kontrolu Youtube
Arduino Hafizali Robot Kol Teknoduino

Ogrenme Fonksiyonuna Sahip Hareket Kopyalayan Robot Kol Yapimi

Robot Kol Proje Hocam

4 Eksen Robot Kol Yapimi Ilginc Arduino Projeleri Hayalet Ve Yap

Akilli Telefon Kontrolu Ile Diy Arduino Robot Kol Yapimi Iz Atolye

3d Yazicidan Robot Kol Yapimi Proje Hocam
Robot Elektronik 3 Boyutlu Akilli Arduino Robot Kol Yapimi
Mekatronik Robot Kol Projesi

Icatlarim Pa Tr On Ene
Robot Kol Elektronik Devreler Projeler
